Grace ZhangI am a fifth-year PhD student at USC, advised by Professor Gaurav Sukhatme. Prior to joining USC, I received my BS in EECS at UC Berkeley where I did research with Professor Sergey Levine . |

|
ResearchI am interested in efficient robot learning methods for automating complex tasks through use of prior knowledge. Specifically, my research focuses on the generalization of learned policies to new environments, sample efficient reinforcement learning through multi-task learning, and the reuse of learned skills in hierarchical RL. My future work focuses on the use of multi-task data and general knowledge for more sample efficient task learning. |
|
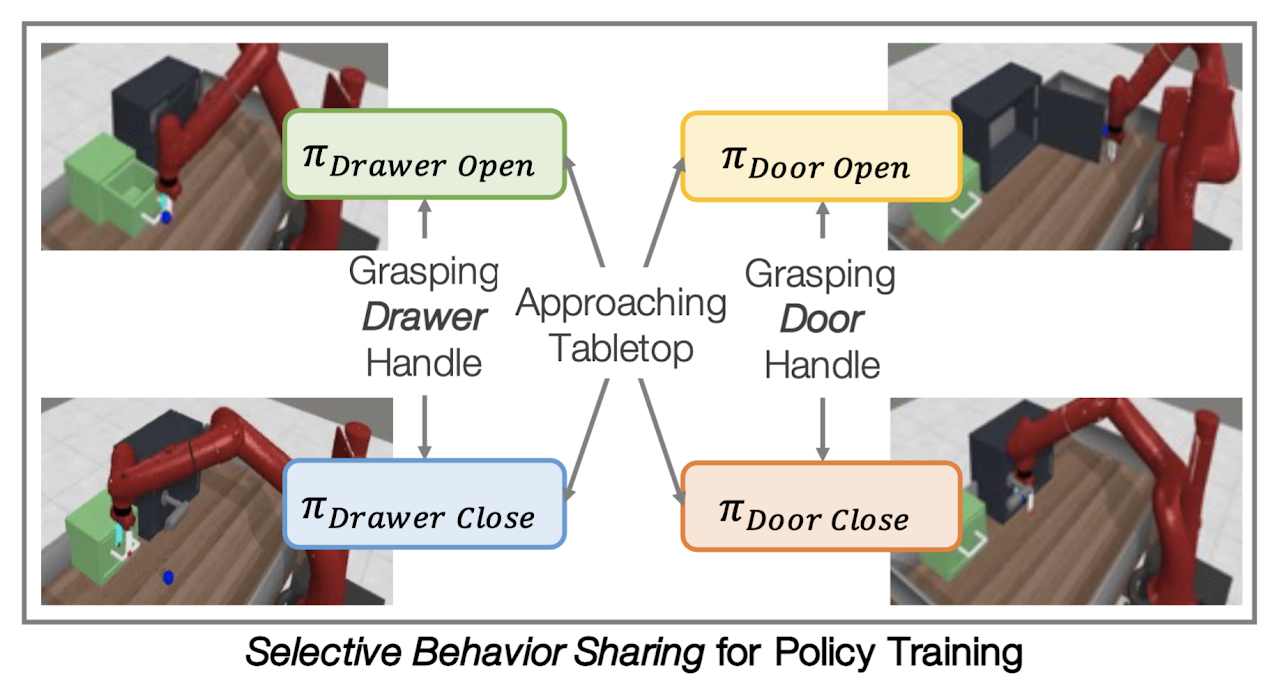
QMP: Q-Switch Mixture of Policies for Multi-Task Behavior SharingGrace Zhang, Ayush Jain, Injune Hwang, Shao-Hua Sun, Joseph J. Lim International Conference on Learning Representations, 2025 paper / website / |
|
Policy Transfer across Visual and Dynamics Domain Gaps via Iterative GroundingGrace Zhang, Linghan Zhong, Youngwoon Lee, Joseph J. Lim Robotics Science and Systems, 2021 paper / website / code / |
|
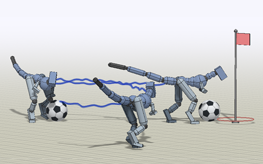
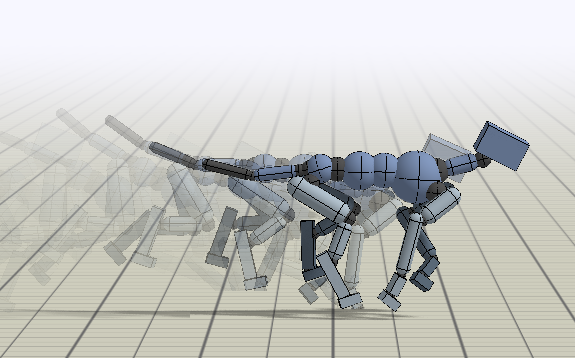
MCP: Learning Composable Hierarchical Control with Multiplicative Compositional PoliciesXue Bin Peng, Michael Chang, Grace Zhang, Pieter Abbeel, Sergey Levine Neural Information Processing Systems, 2019 paper / website / |
|
Advantage-Weighted Regression: Simple and Scalable Off-Policy Reinforcement LearningXue Bin Peng, Aviral Kumar, Grace Zhang, Sergey Levine arXiv Preprint, 2019 paper / website / |
Teaching |

|
EECS 127: Optimization Models in EngineeringUndergraduate Student Instructor Spring 2020 website / |
|
EECS 16A: Designing Information Devices and Systems IUndergraduate Student Instructor Summer 2017 - Fall 2019 website / |
|
Website template from Jon Barron and Leonid Keselman |